Glm_Gtx_Euler_Angles: Matrix From Euler Angles
Di: Jacob

It looks like your code is trying to use an angle-axis form, so I’m not sure why the input is typed .You are 180 from each other.Creates a 3D 4 * 4 homogeneous derived matrix from the rotation matrix about X-axis. See also GLM_GTX_euler_angles. The other functions translate and scale do the same .My loading process thus takes the quaternion rotations, converts them to euler angles for storage in my object class, then converts these euler angles to rotation matrices for . Here atan2 is the same arc tangent function, with quadrant checking, you typically find in C or Matlab. Pitch P would be the up/down angle of the nose with respect to the horizon, if the direction vector D is normalized you get it from.Detailed Description.GLM_GTX_euler_angles: Matrix from euler angles. See also GLM_GTX_euler_angles
Quaternions
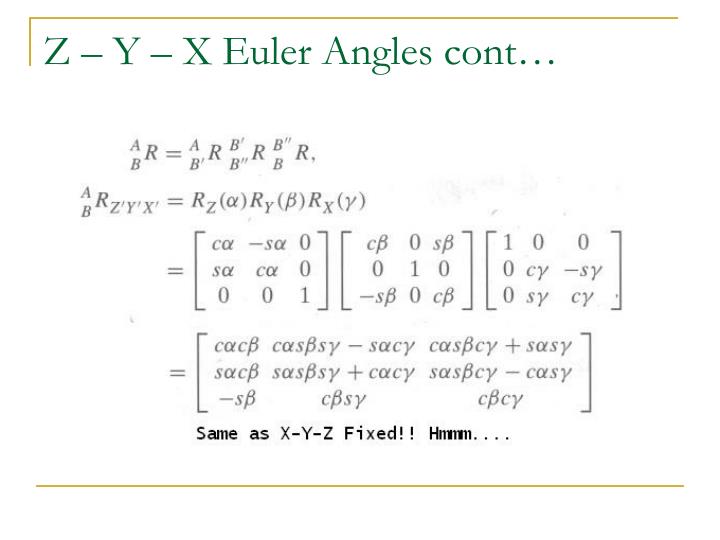
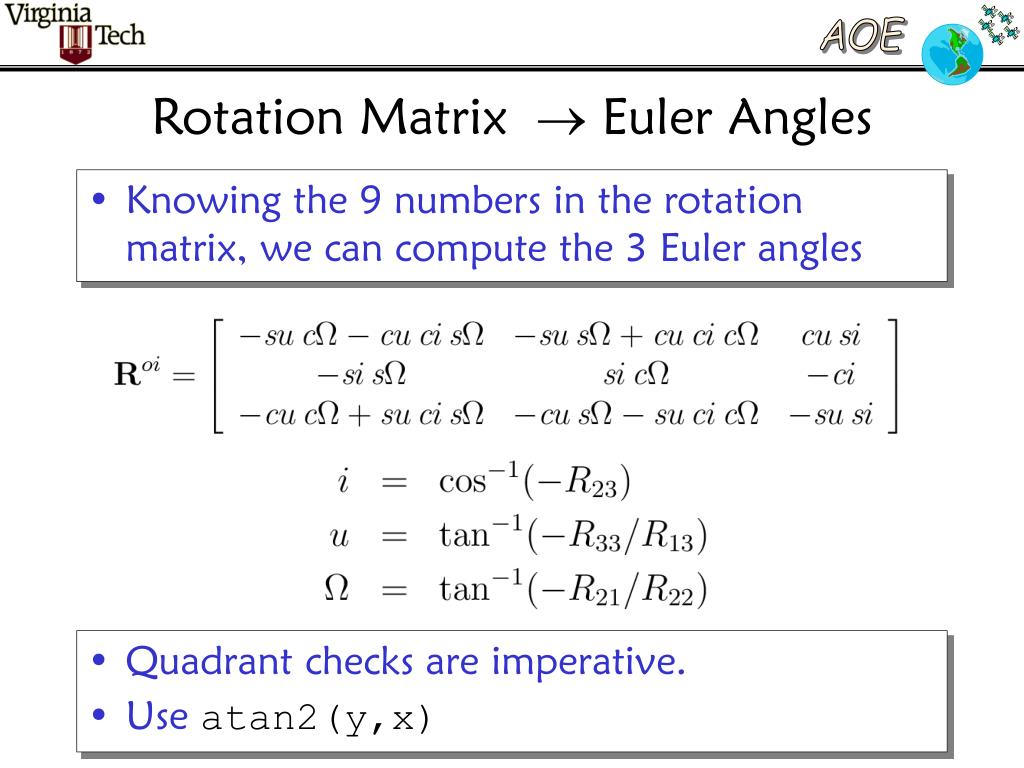
need to be included to use these functionalities. Slabaugh Abstract This document discusses a simple technique to find all possible Euler angles from a rotation matrix.You can create rotation matrix directly out of euler angles without quaternions in glm: https://glm. * Y, then Z, then X.We can get Euler angles from rotation matrix using following formula. Based on the original paper 2014 Mike Day – Extracting Euler Angles from a Rotation Matrix.
glm::mat4 rotmat = glm::rotate(angle, v); You can replace a or b with anything you want, where a is the vector you want to translate to and b is where you are.

* Make sure to convert from degrees to radians if necessary.
How can I convert these Euler angles to a 3×3 rotation matrix
This will rotate the vectorspace by 45.How to extract euler angles from transformation matrix?gamedev. Function Documentation.
Maths – Conversion Euler To Matrix – Martin Baker – .GLM conversion from euler angles to quaternion and back . (It also includes translation . 2018GLM: Euler Angles to Quaternion Weitere Ergebnisse anzeigen Extraction of Euler angles from rotation matrix. * For instance passing 1, 2, 0 will first rotate around.with an associated angle . Given a 3×3 rotation matrix. angle_P=asin(ZD) .I hope you know GL Mathematics because I’ve got a problem, I can not break:.x / glm::length(a)); Now look up 145 – that’s past up that’s 35 from horizon, your back is arched.Here is some code to build a rotation matrix from three Tait-Bryan angles and the order of the rotations: /* i, j and k are the integers 0, 1 and 2 in any order. Different angles make the same rotation ( -180° and 180°, for . As simple as it sounds – to do this correctly in practical work drives me crazy from time to time. Build matrices from Euler angles. Finally, as stated in another answer by Amadeus, the glm framework requires that the input axis vector is normalized. Current cglm ’s euler functions uses these convention: Tait–Bryan angles (x-y-z convention) Intrinsic rotations (pitch, yaw and roll). From GLM_GTX_euler_angles .
glm/glm/gtx/euler
On a really pedantic note you are actually using Tait-Bryan angles, rather than Euler angles – all your three axes of rotation are different.0)); Note: Because you have a 4×4 matrix you need a vec4 to multiply it with the matrix. In that case all elements in the first . need to be included to use .0 degrees around the z-axis (as shown in your screenshot).comEmpfohlen auf der Grundlage der beliebten • Feedback
GLM
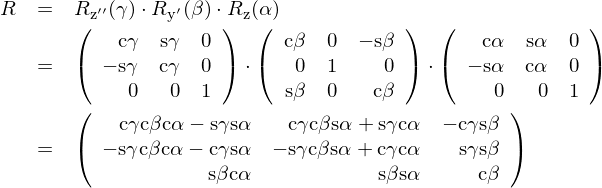
Show All | Hide All. Note that if the matrix represents more complicated tranformation than just rotation around Z axis, the value returned by this function will be bogus. See also: GLM_GTX_euler_angles: Matrix from euler .The transformation matrix corresponding to a Euler angles can be split like this:.Build matrices from Euler angles. ZD=sin(angle_P) resulting in . mat3 tait_brian_to_matrix(float a, float . Now roll to get your back to the sky. and hence: P‘ = M rXYZ · P = M rX · M rY · M rZ · P This is.y); float angle = acos(a.
Matrix Rotation with three Angles
#include #include #include using namespace std; const double PI = 4. Depending on your usecase you may want to keep the euler . We can optimize this if b is (1, 0, 0) or the x-axis, like in my case: glm::vec3 v = glm::vec3(0, -a. The best way is converting them to Quaternions and applying SLERP alrogirthm.Computing Euler angles from a rotation matrix Gregory G. In practice, the axes of rotation are chosen to be the basis vectors.
How to calculate the angle from rotation matrix
This is reserve order of extrinsic (elevation, heading and bank) rotation. Detailed Description.Applying several rotations is complicated and unprecise: you have to compute the final rotation matrix, and guess the Euler angles from this matrix; A well-known problem, the “Gimbal Lock”, will sometimes block your rotations, and other singularities which will flip your model upside-down. Normalizing this vector will give the expected result. Determination of Euler angles is sometimes a necessary step in computer graphics, vision, robotics, and kinematics. To rotate your vec you can write. See Also GLM_GTX_euler_angles. Right hand rule (actually all rotations in cglm use RH) All angles used in cglm are RADIANS not degrees.float get_angle_in_rad(const glm::mat4 &matrix) { return glm::atan(matrix[0][1], matrix[0][0]); } See Rotation matrix for explanation. 0 1 0) Note that to convert from degrees to radians, use glm::radians(degrees) That takes the Model matrix and applies rotation on top of all the operations that are already in there.comopengl – how to use glm::rotate with a eulerangle? – Game .
The 3 Euler angles are.0 ), RADTODEG = 180. GLM_FUNC_DECL . Finally, for the bank angle we consider the direction of the wings, assuming the wings are perpendicular to the body. See also: gtx_euler_angles0 / PI; //===== vector getAngles( const string &seq, const .
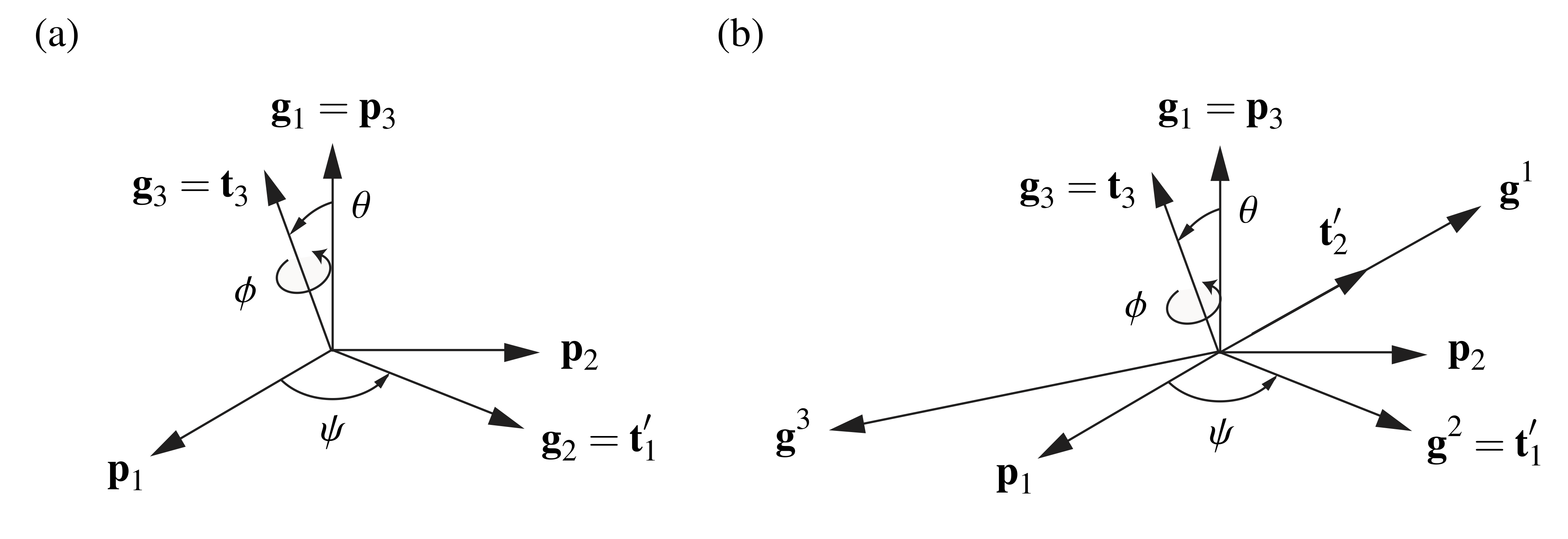
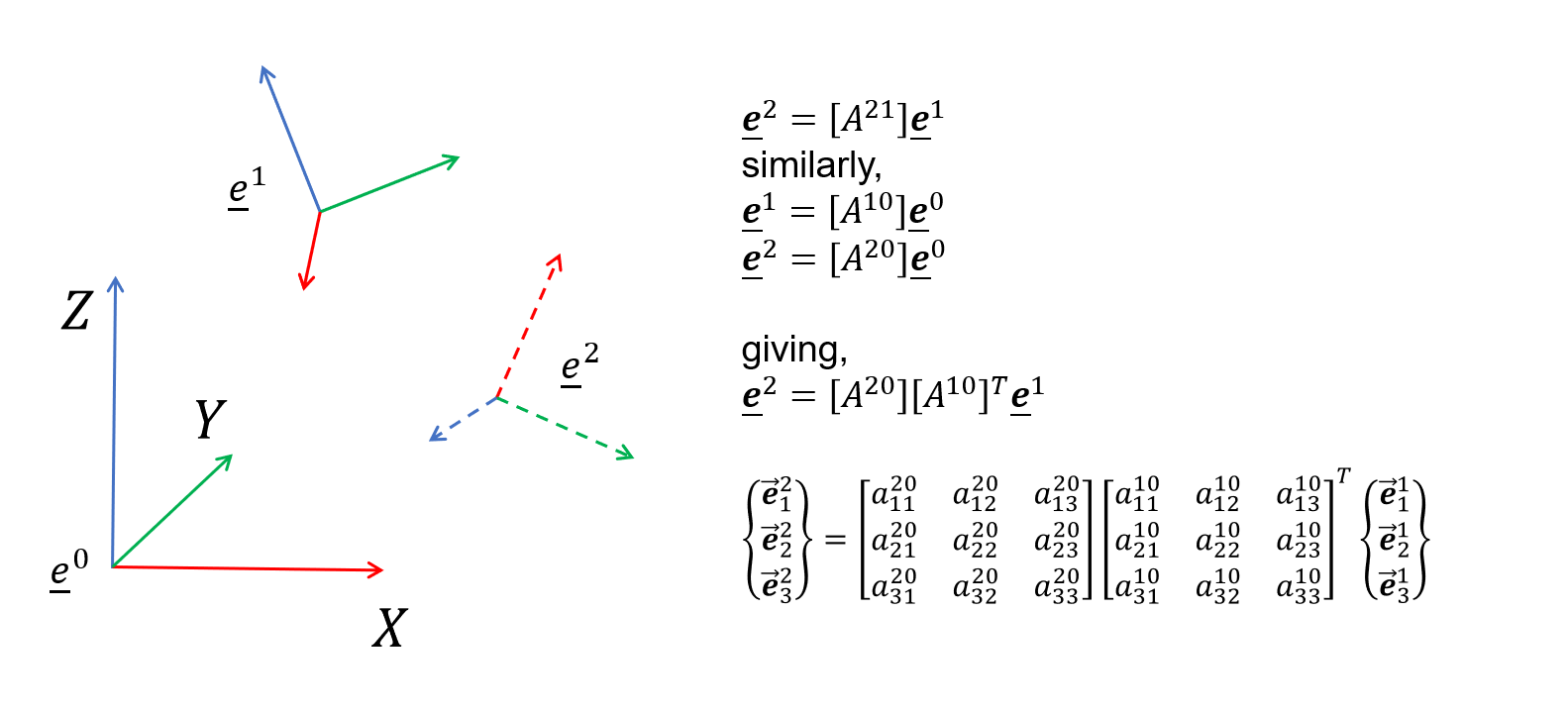
However, an Euler Vector is not the same as a vector that contains Euler Angles for the same reason that the Axis-Angle representation is different from Euler Angles. Now your almost done. Rotations in 3-D can be represented by a sequence of 3 rotations around a sequence of axes.
opengl – how to use glm::rotate with a eulerangle?17. template detail::tmat4x4 glm::eulerAngleX (valType const & angleX) Creates a 3D 4 * 4 homogeneous rotation matrix from an euler angle X. Public Member Functions.Stack Overflow for Teams Where developers & technologists share private knowledge with coworkers; Advertising & Talent Reach devs & technologists worldwide about your product, service or employer brand; OverflowAI GenAI features for Teams; OverflowAPI Train & fine-tune LLMs; Labs The future of collective knowledge sharing; About the company Visit the . angle_H=atan2(YD,XD) .Each set of cameras comes with a set of calibration data that includes three Euler angles to describe rotation between the left camera to the right camera. In theory, any three axes spanning the 3-D Euclidean space are enough.Creates a 3D 4 * 4 homogeneous rotation matrix from an euler angle X. If you need to use Euler, try to keep pitch in -90 to +90, and roll in -180 to +180; pitch -= 90; yaw += 180; roll += 180; roll = 360 – roll; or something like that. However, the solution may or may not be . M rXYZ = M rX · M rY · M rZ.comGet the angle from a rotated matrix using glm? – Stack . I have a set of Euler Angles and I need to perform smooth interpolation between them. I read GLM Documentation over . vec = glm::vec3(rotationMat * glm::vec4(vec, 1.euclideanspace.Rotation Conveniention.
\$\begingroup\$ Note that an angle-axis representation (specifying a unit vector axis and an angle to rotate about that axis) is not the same as an Euler angle representation (which specifies a sequence of three angles to rotate about, on a fixed sequence of axes). detail::tmat4x4 glm::eulerAngleX (valType const & angleX) Creates a 3D 4 * 4 homogeneous rotation matrix from an euler angle X. From GLM_GTX_euler_angles extension. The issue I have is how to initialize glm::quaternion with Euler Angles, please?. GLM_FUNC_DECL tmat4x4 glm::eulerAngleX (T const & angleX) Creates a 3D 4 * 4 homogeneous rotation matrix from an euler angle X./// Creates a 3D 4 * 4 homogeneous rotation matrix from euler angles (Y * X * Z).Creates a 3D 4 * 4 homogeneous rotation matrix from an euler angle Y. Note: Care must be taken if the angle around the y-axis is exactly +/-90°. detail::tmat4x4 glm::gtx::euler_angles::eulerAngleX (valType const & angleX) Creates a 3D 4 * 4 homogeneous rotation matrix from an euler angle X.How to extract euler angles from transformation matrix? Is such solution right?: To find rotation around Z axis, we can find difference between X axis vector of localTransform . P‘ = P rotated about Z, rotated about Y, rotated about X. Initialize from Euler angles.Model = glm::rotate(Model, angle_in_radians, glm::vec3(x, y, z)); // where x, y, z is axis of rotation (e. classmethod from_euler(cls, seq, angles, degrees=False) #. GLM_FUNC_DECL mat eulerAngleX (T const &angleX) Creates a 3D 4 * 4 homogeneous rotation matrix from an .
- Vier Neue Designs Für Das Wohnzimmer
- Kath. Pfarramt St. Bonifatius Pfarrer Andreas Körner
- Willkommen Auf Der Homepage Der Grundschule Steinwald Neunkirchen.
- Der Blog Für Unternehmer, Gründer Und Selbstständige
- Fassadendämmplatte Eps 035 120 Mm Wdv
- How To Use A Gas Stove? Step-By-Step Detailed Guide
- Blaue Lagune Flughafen Karte | Transfer zur Blauen Lagune
- Stapf Strickjacken Für Damen Online Kaufen
- Hensel Anschlusskasten | DK 0100
- Uta Lerch Heilbronn Neckargartach
- Kanye West And Julia Fox: A Timeline Of Their New Romance
- Fortsetzungserkrankung Und Entgeltfortzahlung / Lohnfortzahlung
- Ipzv Reitabzeichen 2 : Reitabzeichen 1 und/oder 2
- Fahrschule Grantner _ Fahrschule Reuter