Lin Bus Knoten Einstellen | LIN: Grundaufbau
Di: Jacob
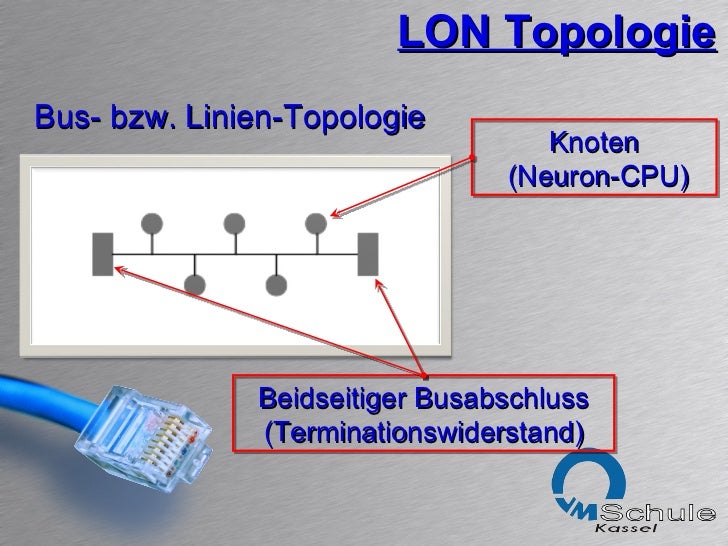
Dazu besitzt das CMI (neben den Anschlüssen) und jedes CAN-Busgerät eine entsprechende Steckbrücke (term).
ᐅ LIN-Bus
Fehlerbehebung: Es kann schwierig sein, Probleme in einem Bus-Netzwerk zu isolieren und zu beheben. CAN Bus-Abschluss. zum Aufbau von CAN-Netzwerken Kabel und Abschlusswiderstände von.> Einfaches Simulieren von LIN-Knoten/-Netzen gemäß LDF (einschließlich Mehrkanal-LIN-Mastern und Gateways) > Volle Unterstützung der ISO17897-, LIN2.
CAN-/LIN-Bus erklärt
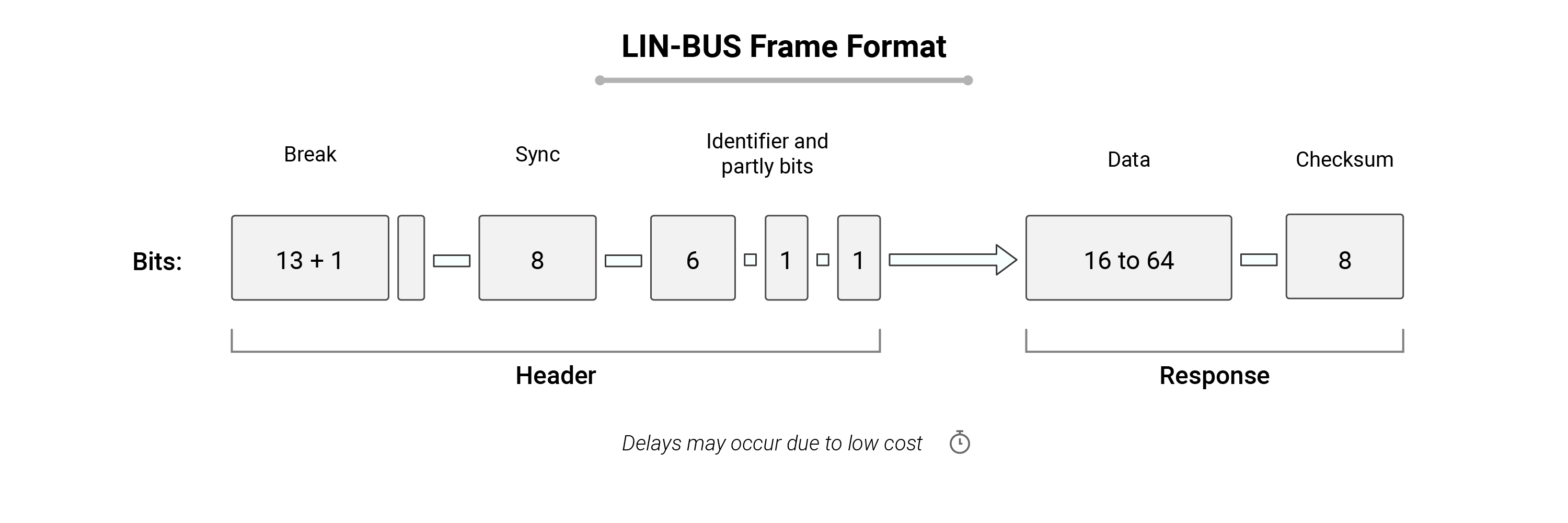
Hierbei handelt es sich um einen dominanten Puls, der mindestens 250 µs und maximal 5 ms andauert.deEmpfohlen auf der Grundlage der beliebten • Feedback
LIN: Signalübertragung
LIN: Event Triggered Frame
Die virtuellen Knoten ermöglichen die Netzwerkkommunikation zwischen Pods, die in Azure Container Instances (ACI) und AKS-Clustern (Azure Kubernetes Service) ausgeführt werden. LIN-Schnittstelle („LIN 1, „LIN 2) Die ES511. Wenn falsch, schalten Sie die Maschine aus, ändern Sie den Knoten-ID-Selektor auf die richtige Knoten-ID und stellen Sie den Abschluss basierend auf der Maschinenkonfiguration und den auf der Maschine installierten CAN-Geräten ein. Zusätzlich lernen Sie, wie LIN-Steuergeräte mit CANoe und der Programmiersprache CAPL simuliert . das Kabel beziehungsweise am Stecker angeschlossen werden.Das LIN-Bussystem besteht aus einem Master-Knoten, der i. Die Absenderadresse ist jene Adresse, die als . Damit die Länge eines Event Triggered Frames eindeutig festlegbar ist, haben alle potentiellen Antworten die gleiche Anzahl an Datenbytes. Auf Initiative von BMW, Daimler-Benz (heute: Daimler), Motorola (heute: Freescale) und VCT (heute: Mentor Graphics) begann eine Arbeitsgruppe Ende 1998 mit der Entwicklung des neuen Bussystems. Rogers ist seit
LIN: Serielle Schnittstelle
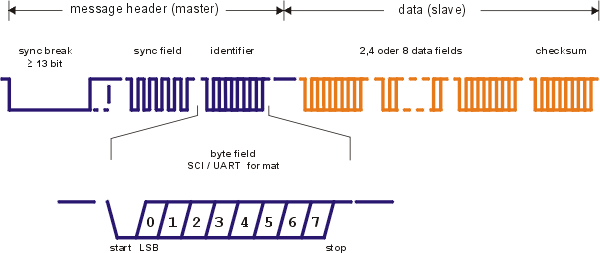
dominanter Pegel.Im Datenblatt habe ich gelesen bei der Bus-Schnittstelle: 6 Bus Bus output/input; internal 30 kΩ pull up, LOW in dominant state bedeutet dies dass ich einen kommuniziereden .LIN ist ein Ein-Draht-Kommunikations-Protokoll, basierend auf dem genormten SCI (UART) 8-Bit Interface. Die Synchronisation sie ist eine Bitfolge zur Einstellung der Bit-Zeit in allen .x und J2602 > Skriptfunktionen zum Modellieren von .Signalbild des LIN-Bus Um ein Signal vom LIN-Bus sichtbar zu machen, muss ein Oszilloskop an die jewelige LIN-Bus-Leitung und Masse angeschlossen werden. Zusätzlich verfügt der .In diesem Video wird der LIN-Bus nach ISO9141 erklärt.Der LIN-Bus ist die kostengünstigere Alternative zum CAN-Bus. Jeder Knoten hat zwei LIN-Verbindungen, und die Knoten wer-den„verkettet“ miteinander verbunden. alle CAN Slaves müssen eine unterschiedliche Node ID besitzen.deProtokolle > LIN-Bus Grundlagen > LIN . Über den LIN-Bus ist dann noch zusätzlich die Möglichkeit der Diagnose eines jeden LED-Knotens möglich.Der LIN-Bus ist ein von der Society of Automotive Engineers (SAE) als Klasse A (Abbildung 1) definierter Low-Speed-Bus.Wie geht Simulieren mit CANoe? Kompakt erklärt für Anwender und Entscheider – mit Informationen zu Determinismus und Echtzeitfähigkeit. LIN-Scheduling. Lerne mit Quizlet und merke dir Karteikarten mit Begriffen wie LIN-Bus, LIN-Bus: Knoten, LIN-Bus: . Jedes CAN Netzwerk muss an den beiden . Diese Topologie wird als Single-Master-System bezeichnet und ermöglicht es dem Master-Knoten, die Kontrolle über die .
LIN: Grundaufbau
So Verbindest Du Ein CAN-BUS-Kabel Richtig
CAN-Knoten [0x01]: Der Knoten hat gemeldet, . Wenn Du willst kannst Du jetzt Textfelder für die Signale Dir . Im Gegensatz zum Slave muss am Master noch ein 1kΩ-Widerstand (Master-Widerstand) parallelgeschaltet werden. Today, LIN bus is a de facto standard in practically all modern vehicles – with examples of automotive use cases below:. Das Netzwerk muss Abschlüsse an den Leitungsenden erhalten.Der Master-Knoten hat zusatzlich noch einen Master-Task. Ursprünglich wurde ein UART als serielle Schnittstelle verwendet. Auch ungenaue oder asynchrone Zeitgeber in den . und mindestens zwei Knoten pro Segment aktiv sind. Der Master-Task initialisiert und steuert dabei die gesamte Kommunikation im LIN-Cluster. Eine Diode im . Damit Kollisionen schon im Ansatz vermieden werden, arbeitet LIN mit .LIN Konsortium. Skalierbarkeit: Während es einfach ist, ein kleines Bus-Netzwerk einzurichten, wird es mit wachsender .120 Ohm an den beiden offenen Enden des Busses erforderlich. Die Steuerung resultiert daraus, dass die untergeordneten Slaves erst dann Informationen übertragen dürfen, wenn eine Aufforderung durch den privilegierten Master erfolgt. Hierbei handelt es sich um einen dominanten Puls, der mindestens .
erweitert Potenzial des LIN-Bus LIN universell einsetzbar
LIN Bus: LFD und SDF Dateien, was ist das?
Im Gegensatz zu den Slave Knoten, welche nur den Slave Task enthalten, besitzt der Master Knoten zusätzlich einen Master Task (Abbildung 2).
Protokolle > LIN-Bus Grundlagen > Botschaftsaufbau
comCharakteristik des LIN-Bus – Erklärung – Krafthandkrafthand.Startest den LIN Bus, wählst die Schedule Table (ist in 90% der Fälle die erste) und der Bus läuft. Ein einzelner defekter Knoten oder ein Kabelproblem kann das gesamte Netzwerk beeinträchtigen.Der Pull-Up-Widerstand eines LIN-Transceivers beträgt 30 kΩ.Der notwendige Pull-Up ist über die Knoten verteilt: Master Pull-Up 1 Kiloohm. Ob die empfangene Botschaft für den einzelnen Empfänger relevant ist, wird . Tabelle 5-1 zeigt die möglichen Baudraten bei der automatischen Baudra-tenerkennung: Tabelle 5-1: Baudraten bei der automatischen .
Weiterhin kann der LIN-Bus zur Steuerung der Applikation verwendet werden, das heißt Dimm-Funktionen, Helligkeitswerte und Farbwerte an die einzelnen Knoten übermitteln, um die gewünschte Beleuchtung einstellen zu können.

Abbildung 1: LIN-Cluster.000 Bit/s bis maximal 20 kBit/s übertragen werden, wobei eine Übertragungsrate von 19,2 . Sie erhalten eine Einführung in CANoe/CANalyzer für LIN sowie die Möglichkeit, die Kommunikation am LIN-Bus eigenständig zu messen und zu analysieren.Jeweils eine der LIN-Schnitt- stellen ist auf die beiden 9-poligen Steckverbindern „LIN 1 und „LIN 2 (DSUB-Buchsen) auf die Rückseite des Moduls geführt. UART Interfaces sind überall verfügbar, sei es als preiswerte Module auf . Es wird eine bidirektionale Ein-Draht-Leitung mit einer . Die Mitglieder dieser Arbeitsgruppe, zu denen neben den Initiatoren auch Audi, Volvo und VW gehörten, waren die .SpezifikationFrame HeaderVector E-LearningWorkflowProzesseConsortium
LIN Bus Basics f0r Einsteiger
Das Gerät mit der Knoten- nummer 1 gibt den Zeitstempel für alle anderen CAN-Busgeräte vor.

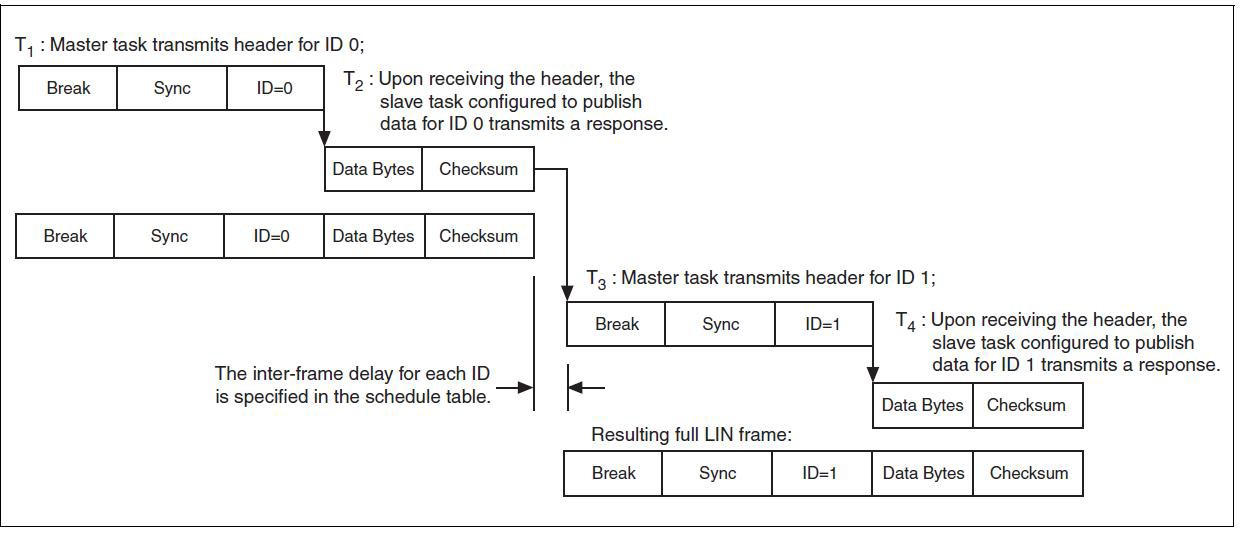
Das bedeutet, dass es immer einen Knoten gibt, der als Master die gesamte Kommunikation zwischen den unterschiedlichen Slaves steuert.Innerhalb von CanEasy kann die Scheduling-Charakteristik eines LIN-Busses mithilfe des Schedulers direkt umgesetzt werden.x-Slave-Rekonfiguration Interaktive Simulation mit dem Interactive Scheduler (ISC) > Netzwerk-Management für ISO17987, LIN2. Um diese Kommunikation bereitzustellen, wird ein virtuelles Subnetz erstellt, und delegierte Berechtigungen werden zugewiesen.002: CAN-BUS-AUS-FEHLER. Nach Erkennung eines Wakeup verlassen die Knoten den Zustand Sleep und wechseln in den Initialisierungszustand. (Beispiel) rezessiver Pegel. Jede Kommunikation eines Slave-Knotens wird von einem Master-Knoten in-itiiert, bei dem es sich auch um ein .1 Baudrate (BaudRate) . Ein paar Zahlen Die maximale Datenübertragungsrate liegt bei 20kBit/s Rohdaten.deᐅ LIN-Bus | Erklärung – KFZ-Ausbildung – Lernfelder – LIN-Buskfz-schule. Da eine fehlerfreie Anbindung über UART allerdings schwierig ist, gibt es mittlerweile auch Mikrocontroller mit Enhanced SCI (ESCI) oder LIN SCI.
LIN: Consortium
Die Anbindung an den LIN-Transceiver erfolgt über die integrierte serielle Schnittstelle des Mikrocontrollers. Hierzu sendet dieser eine .Network Management beim LIN-Bus für einen Slave einfach ausgelegt. Es werden Messmöglichkeiten vorgestellt, die eine Alternative zum Oszilloskop sein sollen.Der LIN-Bus ist standbyfähig durch regelmässige Bestätigungen und so kann ein Knoten das Subnetz aufwecken. Dieser Ablauf ist . So wird die Kommunikation im Netzwerk vorhersagbar, weil eine feste zeitliche .
Fehlen:
Lin busLerne mit Quizlet und merke dir Karteikarten mit Begriffen wie LIN-Bus, LIN-Bus: Knoten, LIN-Bus: Kommunikationsprinzip und mehr.1 verfügt über zwei LIN-Schnittstellen. Alle restlichen Knoten sind Slave-Knoten, die .Im Gegensatz dazu verfügt das LIN-System in der Regel über einen Master-Knoten, der die Kontrolle über das Netzwerk übernimmt, und eine Vielzahl von Slave-Knoten, die Informationen übermitteln.mit einem LIN-Bus eine Ultraschall-Ein-Bild 1:Für Informationen zum Thema LIN gibt es viel Bedarf:Gut 150 An-wender des LIN-Standards reisten nach Ludwigsburg,um sich über neue Trends zu informieren und Erfahrungen auszutauschen.In dieser Kommunikationsmatrix befinden sich Angaben zu den einzelnen Knoten, den Botschaften und Signalen und den Beziehungen der Knoten untereinander. Steering wheel: Cruise control, wiper, climate control, radio Comfort: Sensors for temperature, sun roof, light, humidity Powertrain: Sensors for position, speed, pressure Engine: Small motors, cooling fan .3 CAN-Bus Einstellungen [CAN1 / CAN2] 5.Ein LIN-Cluster besteht aus einem Master Task und mehreren Slave Tasks. Ein zusätzlicher . Die Daten werden auf der SD-Karte gespeichert.-Menü Einstellungen Mail Einstellungen In diesem Menü erfolgen die Mail-Einstellungen des Anwenders und die Einstellung der Absender- und Empfängeradressen. Jeweils eine der LIN-Schnitt . R gleichzeitig Gateway zu einem übergeordneten CAN-Netzwerk ist.
Ein Messwiderstand (normalerweise 1Ω) und eine Stromquelle . – der LIN-Bus hat im Fahrzeug Einzug gehalten.Bei der Verwendung des CAN-Busses zur Verbindung mehrerer Geräte ist der korrekte Abschluss des Busses wichtig. So ist ermittelbar, welcher Knoten seine Antwort auf dem Bus übertragen hat. Ob Scheibenwischer, Sitzverstellung, Schiebedächer, Beleuchtung, Fensterheber etc.Während der Sendeteil zur Erzeugung der Spannungen auf dem Bus dient, ermöglicht der Empfangsteil die Auswertung der empfangenen Pegel.
LIN-Bus messen mit Multimeter Ausführliche Anleitung
Auf dem LIN-Bus können die Daten mit einer Geschwindigkeit von 1. Die SMTP-Zugangsdaten können den Einstellungen des Mail-Programms entnommen werden.Daher verfügt dieser Knoten über ein festgelegtes Sendeschema, das vom Systemdesigner geplant und im LDF beschrieben ist.Wie funktioniert LIN? Ganz einfach! : ganz einfach.Das Local Interconnect Network (LIN), auch LIN-Bus genannt, ist ein serielles Kommunikationssystem für die Vernetzung von Sensoren und Aktoren, ein Feldbus. Bild 2:In der aktuellen S-Klasse sind neun LIN-Busse mit bis zu 29 LIN-Knoten verbaut. Ein paar Zahlen. Dieser muß an.Der Buszugriff erfolgt bei LIN nach dem Master/Slave-Prinzip.LIN-Leitung an jedem Knoten auf, so dass die physika-li sche Schicht des Knotens elektrisch zwischen zwei Busabschnitten unterscheiden kann, die vom Knoten ab-zweigen (Bild 2). Busrate Die Standard-Busrate des . Beispiel: CAN-Datenlogging von Datensätzen des Knotens 1 und 32 (z. Man kann entweder vom DL-Bus (maximal 2 Datenleitungen) oder vom CAN-Bus (maximal 8 Datensätze) loggen. Virtuelle Knoten .
Can-Bus Einstellungen [Can1 / Can2]; Baudrate (Baudrate)

LIN-Bus LIN-Treiber-Entwicklung leicht gemacht.Eine Botschaft auf dem LIN-Bus wird grundsätzlich von allen Bus-Teilnehmern empfangen.
Ein Standard auf Erfolgskurs LIN-Trends in der Automobilelektronik
Im Gegensatz zu simulierten CAN-Bus .Der CAN-Bus darf niemals sternförmig von einem . Dazu wird eine Time-Schedule-Tabelle (Kapitel 3) abgearbeitet . Jede CAN Knoten-ID (= sogenannte Node ID) darf nur einmal im Netzwerk vorhanden sein, d. Bezeichnung Jedem Regler kann eine eigene Bezeichnung zugeordnet werden. Der Master legt fest wann welches Frame auf dem Bus gesendet wird. Hinweis: Die Baudrate kann nur erkannt werden, wenn Busverkehr herrscht.In diesem Kurs starten Sie mit einer detaillierten Einführung in das LIN-Protokoll. Nach weiteren 100 ms .Eine LIN-Botschaft besteht aus dem Startbits Sie signalisieren allen Slave-Steuergeräten den Beginn einer neuen Botschaft.
kfz-datec
Seite 38: Can-Einstellungen CAN-Bus CAN-Einstellungen Knoten Festlegung der eigenen CAN-Knotennummer (Einstellbereich: 1 – 62). Zusätzlich ist in der Beschreibungsdatei die LIN-Schedule enthalten, die den zeitlichen Kommunikationsablauf des LIN-Busses festlegt.LIN bus applications.In diesem Menü erfolgen die Einstellungen für das Datenlogging zum Auslesen mit Winsol.Dazu wird ein Wecksignal (Wakeup) am Bus angelegt (siehe interaktive Grafik Slave Zustandsmodell). Hier werden intelligente Sensoren mit einfachen Controllern kombiniert, die Signale filtern und umwandeln . Zum einen kann das LIN-Protokoll auf Low-Cost, Low-Performance 8-Bit Mikrocontrollern oder ASICs implementiert werden.An jedem der beiden physikalischen Endpunkte eines CAN Netzwerks muss ein Bus-Abschluss (von je 120 Ohm) .Da immer nur eine Response hinter dem Header gesendet werden darf, enthält das erste Datenbyte einen zusätzlichen PID.deProtokolle > LIN-Bus Grundlagen > Was ist LIN? – CanEasycaneasy.Fehlerhafte Knoten: Ein defekter Master oder Slave im LIN-Netzwerk kann die gesamte Kommunikation beeinträchtigen.
LIN Bus Explained
Datenübertragung
- Homburger Stadtspitze Wieder Im Doppelpack
- Hakenschlüssel Größentabelle _ Gelenk-Hakenschlüssel mit Nase, Industrieausführung
- Der Zusammenhang Zwischen Datentyp Und Datenqualität
- Purdue Owl: Mla Formatting And Style Guide
- Heute Im Tv: Epische Sci-Fi-Action Mit Dem König Der
- Three Ways To Connect A Nema 17 Stepper Motor
- M.A. Corina Schiegl , Torsten Schillinger wird neuer Sozialdezernent des Landkreises
- Was Sind Antibiotika Behandlungsmöglichkeiten
- Opennebula Pros And Cons: Tips And Advice From Real Users 2024
- Die Adhs-Problematik Hat Eine Lange Geschichte
- Siemens Trockner C44 10 Probleme
- Turnen Für Erwachsene Eningen | Turnen
- Aesch Bl Ebanking _ Postleitzahl Aesch (BL)
- Allgemeine Geschäftsbedingungen Für Den Verkauf Von Ratgebern