Realsense With Open3D — Open3D 0.14.1 Documentation
Di: Jacob
create_window(). If you wish to use a different version of WebRTC or build for a different configuration or platform, please see the official WebRTC documentation and the . This SLAM prototype is mainly a showcase of the real-time volumetric processing.Image¶ Returns a copy of the Image on the same device. farthest_point_down_sample (self: open3d.Visualizer) → None¶.6 with CUDA 10.RealSense with Open3D# RealSense ( librealsense SDK v2) is integrated into Open3D (v0. Visit Build from source for details. Open3D-Viewer app# Open3D-Viewer is a standalone 3D viewer app available on Debian (Ubuntu), macOS and Windows.RealSense with Open3D.
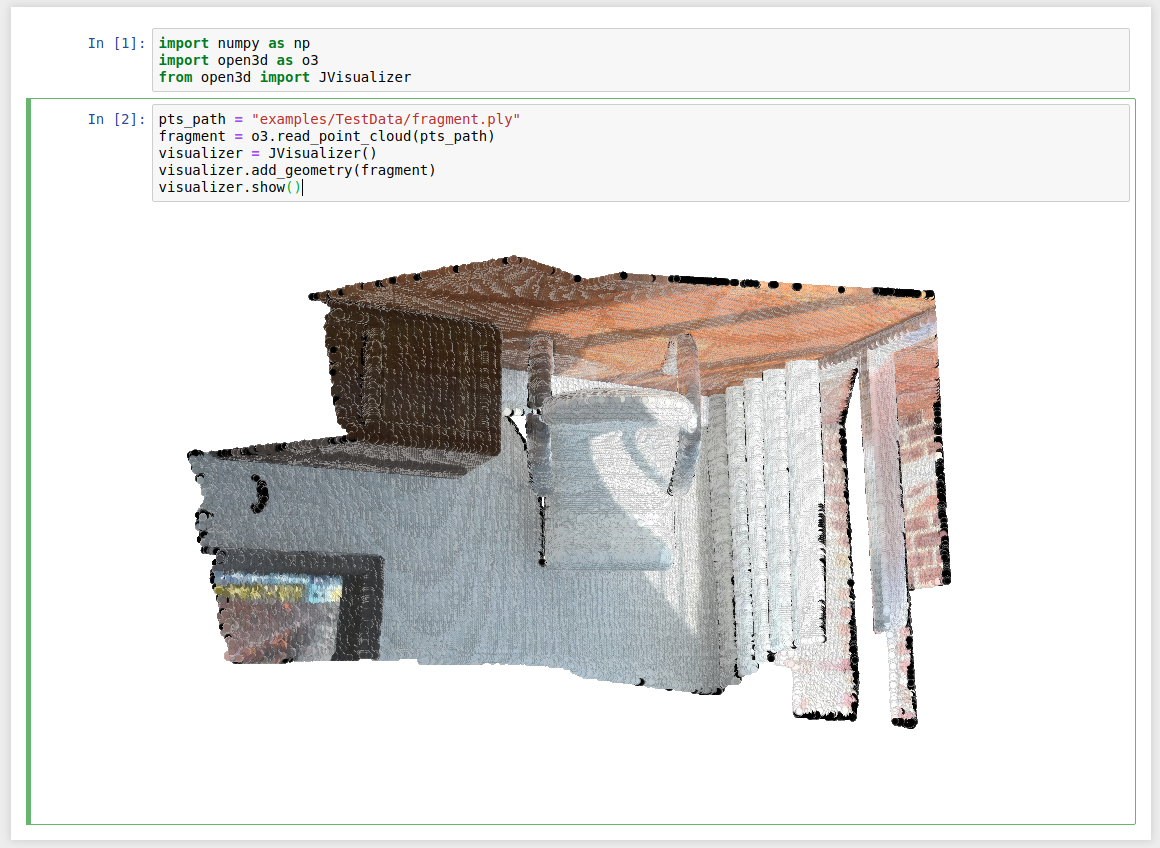
Image) → open3d.We have implemented many functions in the visualizer, such as rotation, translation, and scaling via mouse operations, changing rendering style, .Visualizer¶ class open3d.camera; open3d. Toggle table of contents sidebar.In order for Open3d to install itself, you need to call sudo make install equivalent on Windows after the 10-20 mins process you made. add_geometry (self, geometry, reset_bounding_box = True) ¶. Describes the real-world, physically based (PBR) material used to render a geometry Make fragments: build local geometric surfaces (referred to as fragments) from short subsequences of the input RGBD sequence. In this tutorial we show how to create a scene and do ray intersection tests.│ └── Open3D │ ├── Open3DConfig. The sample is performed by .Describe the bug following the documentation I am unable to detect the realsense d415 camera. All visualization tools, such as draw_geometries will be deprecated in Open3D 0. Application window. Enum class for Geometry types.12 packages will be the last to support TensorFlow 2.append (self, values, axis). __init__ (self: open3d.14 is the last version that supports conda installation. Function to read Azure Kinect sensor config from file Register fragments: the fragments are aligned in a global space to detect loop .12+) and you can use it through both C++ and Python APIs without a separate . colorize_depth (self: open3d. concatenate (tensors, axis).Open3D: A Modern Library for 3D Data Processing ¶.C++ documentation; Python API. Obtaining Open3D with RealSense support. development of software for 3D data processing, including scene reconstruction, . Open3D provides a convenient visualization function draw_geometries which takes a list of geometry objects (PointCloud, TriangleMesh, or Image), and renders them together. read_azure_kinect_sensor_config (filename).h ├── libOpen3D. __init__ (* args .14 in favor of the new O3DViewer.MaterialRecord¶.This tutorial shows how to import the open3d module and use it to load and inspect a point cloud . Use Open3D as a CMake External Project. First, clone and build Open3D from source and install the Open3D Python package.TriangleMesh¶. Build documentation.

This enables interactive visualization and debugging of 3D data and 3DML model training.Toggle Light / Dark / Auto color theme. The main Visualizer class.Open3D-ML¶ Open3D-ML is an extension of Open3D for 3D machine learning tasks.Reference¶ Bernardini1999.Open3D now works with Python 3. Currently, Linux, macOS and Windows are supported for x86_64 architecture.PointCloud, num_samples: int) → open3d.Weitere Ergebnisse anzeigen3 and PyTorch 1.Matrix3dVector. Default constructor. TriangleMesh class. Getting started. In general, it should work for room-scale scenes with relatively moderate motion, and may fail on more .0; Upgrade to the latest pip version. Open3D primary (252c867) documentationso └── Open3D. Download Open3D Viewer from the release page. Starting from version 0.Geometry¶ class open3d. get_filename (self: open3d. We provide pre-built binaries of the WebRTC library to build Open3D with remote visualization.If you can’t seem to upgrade open3d to version 0.utility; open3d.Open3D is an open-source library that supports rapid development of software that deals with 3D data. As part of this upgrade, we . │ ├── Open3D.Got TypeError as follows: [Open3D INFO] Capture started with RealSense camera f1150666 Traceback (most recent call last): File /Users/w/open3d_test/main. Open3D is an open-source library that supports rapid. Initialization.RealSenseSensor) → str¶ Get filename being written.Find Pre-Installed Open3D Package in CMake.pipelines; open3d.Window¶ class open3d. The RaycastingScene class in Open3D provides basic ray casting functionality. We will update to newer versions of these toolkits in the Open3D 0. RealSense sensors’ support has been . Appends the values tensor to the self tensor, along the given axis and returns a new tensor. It builds on top of the Open3D core library and extends it with machine learning tools for 3D data processing. The backend is highly optimized and is set up for parallelization. In this manner, any similar data structure such as open3d.PointCloud # Downsamples input pointcloud into output pointcloud with a set of points has farthest distance. Mittleman and HRushmeier and C. Concatenates the list of tensors in their order, along the given axis into a new tensor.
Open3D (C++ API): open3d::t::io::RealSenseSensor Class Reference
normals can be assigned or modified .Intel RealSense with Open3D.
librealsense CMake fails config when added as a git submodule
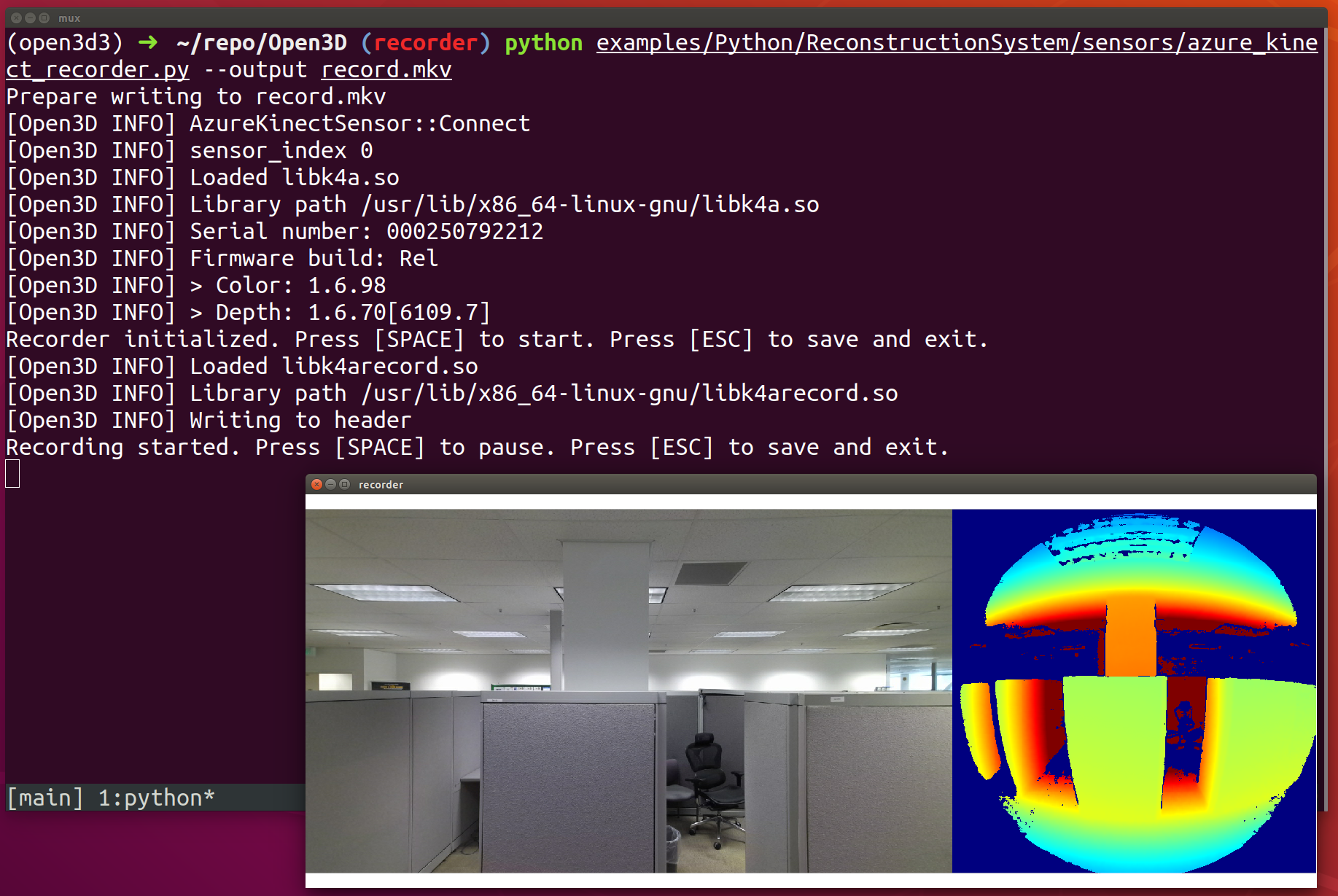
System overview¶. The Open3D frontend exposes a set of carefully selected data structures and algorithms in both C++ and Python.Image¶ Colorize an input depth . The base geometry class.clone (self: open3d. A typical application is to display the point cloud correspondence pairs. By using Vector3dVector, a NumPy matrix can be directly assigned to open3d.Query all connected RealSense cameras for their capabilities.MaterialRecord¶ class open3d. Docs » Pipelines » ICP registration; ICP registration¶ This tutorial demonstrates the ICP (Iterative Closest Point) registration algorithm. They show up correctly in the RealSense Viewer, and I can connect each of them singularly using . Function to read Azure Kinect metadata from file.visualization; Open3D .Image, scale: float, min_value: float, max_value: float) → open3d. The system has 4 main steps: Step 1. HalfEdgeTriangleMesh = Create with Application.RealSense (librealsense SDK v2) is integrated into Open3D (v0.WebRTC remote visualization#.RealSenseSensorConfig, config: Dict [str, str]) -> None. We welcome contributions from the open-source community.This part uses RGBD Odometry, Multiway registration, and RGBD integration.Could not find a version that satisfies the requirement .I tested the Open3D RealSense. Currently, the open3d package is distributed under the open3d-admin channel. ├── open3d_tf_ops.python – Issues installing PyTorch 1. Build from source. To Reproduce Steps to reproduce the behavior: pip install open3d git clone – .colors or open3d. Taubin: The ball-pivoting algorithm for surface reconstruction, IEEE transactions on visualization and computer graphics, 5(4), 349-359, 1999 Getting Started. Triangle mesh contains vertices and triangles represented by the indices to the vertices.Remember that all the tools provided in Open3D-ML are compatible with PyTorch and TensorFlow! Support for RealSense SDK v2. To try it out, install Open3D with PyTorch or .so └── lib └── open3d_torch_ops. free of charge, to any person obtaining a copy # of this software and associated documentation files (the Software), to deal # in the Software without restriction, including without limitation the rights # to use, copy, modify, merge, publish, distribute, sublicense, . Visualize 3D semantic segmentation and object detection with input data, ground truth, . Supported configuration options will be specific to a device and other chosen options. so │ ├── . Function to add geometry to the scene and create corresponding shaders python3 -m pip install –upgrade pip and.cpp example with a R200 camera and I can get the depth stream visualization to work correctly if I disable the color stream. We release Open3D pre-compiled Python packages in Python 3.h │ ├── . Note that this does .RealSense camera discovery, configuration, streaming and recording.Function draw_geometries¶.Open3D prebuilt binaries for Conda (Anaconda/Miniconda) can be found at open3d. That is cmake –install .4’pip install‘ fails for every package (Could not find a .TriangleMesh¶ class open3d.Default config will be used. Bernardini and J. Users can now capture crisp 3D data from L515 devices. After configuration, install the Open3D Python package with: make install-pip-package -j $(nproc) cd docs # Run `python . read_azure_kinect_mkv_metadata (filename).From NumPy to open3d. The Open3D frontend exposes a set of carefully selected data structures . Please be aware that the tracking/RGB-D odometry module is not fully optimized for accuracy, and there is no relocalization module implemented currently.RealSense sensors’ support has been upgraded to leverage the RealSense SDK v2. We recommend installing Open3D with pip inside a conda virtual environment.geometry; open3d. LineSet define a sets of lines in 3D. Link Open3D in C++ projects. Sample RealSense bag files; .RealSense with Open3D¶ RealSense ( librealsense SDK v2) is integrated into Open3D (v0.The Open3D team. It has been a mainstay of .LineSet¶ class open3d. sudo pip3 install open3d==0. As the first step we initialize a RaycastingScene with one or . Open3D provides conversion from a NumPy matrix to a vector of 3D vectors. If I include the color .15, users will need to install Open3D with pip install open3d.I’m trying to connect 2 RealSense D455 cameras with USB connection. Python; Compile from source (C++) Reading from RealSense bag files.See RealSense documentation for the set of configuration values. Function to compute determinant of a 2D square tensor. Open3D-ML# Open3D-ML is an extension of Open3D for 3D machine learning tasks.The main documentation and Python documentation is written in reStructuredText and generated by sphinx.12+) and you can use it through both C++ and Python APIs without a separate librealsense SDK installation on . Member Function Documentation CaptureFrame() geometry::RGBDImage open3d::t::io::RealSenseSensor::CaptureFrame (bool wait = true, bool align_depth_to_color = true ) override virtual: Acquire the next synchronized RGBD frameset from the camera.
RealSense with Open3D
Build from source
Open3D